A Demonstration of YUBI: Your Universal Body Interface Using Finger Force to Full-Body Motion for Avatar Embodiment
SIGGRAPH ’25: Special Interest Group on Computer Graphics and Interactive Techniques Conference
Abstract
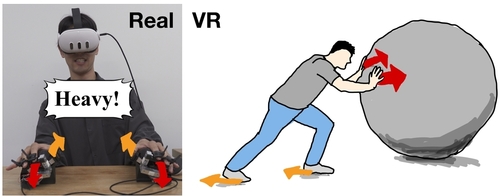
YUBI, a novel interface, translates nuanced finger force inputs into continuous, full-body avatar motion, fostering strong embodiment in virtual reality. It enables embodied interactions such as object manipulation and navigation using only finger force, overcoming physical constraints while delivering realistic haptic experiences. Crucially, YUBI renders reaction forces to the fingers, allowing users to perceive virtual object properties (e.g., weight and stiffness) through the effort of their input. By dynamically adapting the force-motion relationship based on object characteristics, YUBI provides intuitive haptic perception, significantly enhancing haptic realism and avatar embodiment.