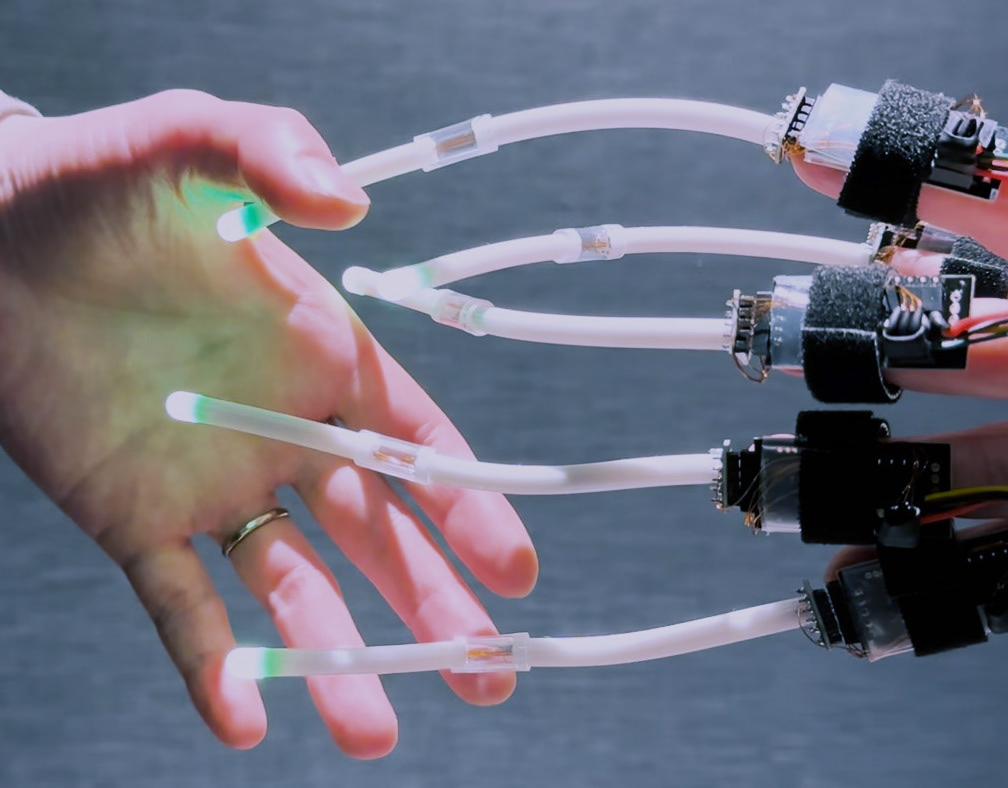
Parasitic Finger: Coexistence with Artificial Organism
– ACM SIGGRAPH 2025, Emerging Technologies
Authors: Akira Nakayasu, Saki Sakaguchi, Mina Shibasaki
Abstract
The Parasitic Finger project explores how humans coexist with uncontrollable finger augmentation with an SMA actuator. What would happen if our fingers, which we use freely in daily life, could move in unrealistic ways, independent of our will? The finger actuator unit weighs just 5 grams and is lightweight, making it comfortable to wear on the fingertips. By regulating the heat of the SMA wires, the SMA actuator can bend in four directions. Unlike human finger joints, they move like tentacles, performing actions such as waving, touching objects, or grasping items. We designed the finger movements so that participants would feel a sense of biological agency or animacy.
Keywords
Human Augmentation, Cyborgs, Digital Cyborgs, Human-machine Integration, Soft Actuator, Shape-Memory Alloy
Reference
https://dl.acm.org/doi/10.1145/3721257.3734023
https://nakayasu.com/parasitic-finger
https://www.toki.co.jp/biometal/products/WhtsBM.php
https://old2-lecture.nakayasu.com/index_p=2896.html
Presentation