報告者:廖志唯
報告PPT:https://drive.google.com/file/d/17CMDrUC2Y-Wposv_7pKJ6Rnc6nDkAql5/view?usp=sharing
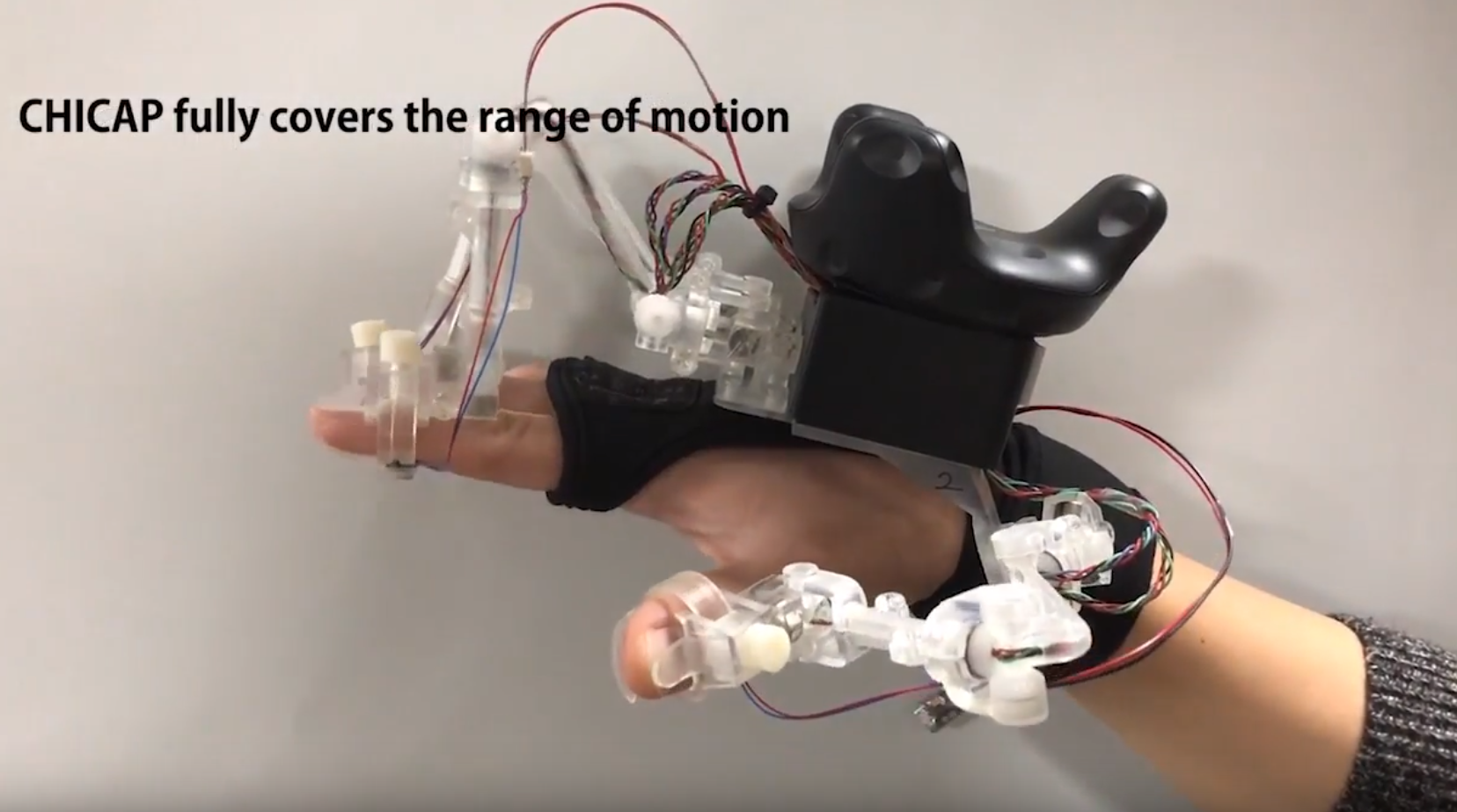
文獻題目:CHICAP
文獻作者:Yong-Ho Lee, Mincheol Kim, Hwang-Youn Kim, Dongmyoung Lee, Bum-Jae You
文獻來源:https://dl.acm.org/doi/10.1145/3214907.3214924
影片: https://www.youtube.com/watch?v=JKKucw4ATNY
摘要:
In the research, we propose a cost-effective 3-finger exoskeleton hand motion-capturing device and a physics engine-based hand interaction module for immersive experience in manipulation of virtual objects. The developed device provides 12 DOFs data of finger motion by a unique bevel-gear structure as well as the use of six 3D magnetic sensors. It shows a small error in relative distance between two fingertips less than 2 mm and allows the user to reproduce precise hand motion while processing the complex joint data in real-time. We synchronize hand motion with a physics engine-based interaction framework that includes a grasp interpreter and multi-modal feedback operation in virtual reality to minimize penetration of a hand into an object. The system enables feasibility of object manipulation as far as the needs go in various tasks in virtual environment.